MolmoAct 2.
Penalaran tiga dimensi untuk aksi robot yang lebih cerdas dan cepat
MolmoAct 2 adalah model robot open source dengan penalaran 3D, mendukung tugas bimanual tanpa fine-tuning, 37x lebih cepat untuk riset robotika.
Peringkat Mingguan
▲ #19Suara
327Platform
Web / MobileDiluncurkan
Recently
Favorite — quick open from Home.
Lebih Lanjut Tentang MolmoAct 2
MolmoAct 2
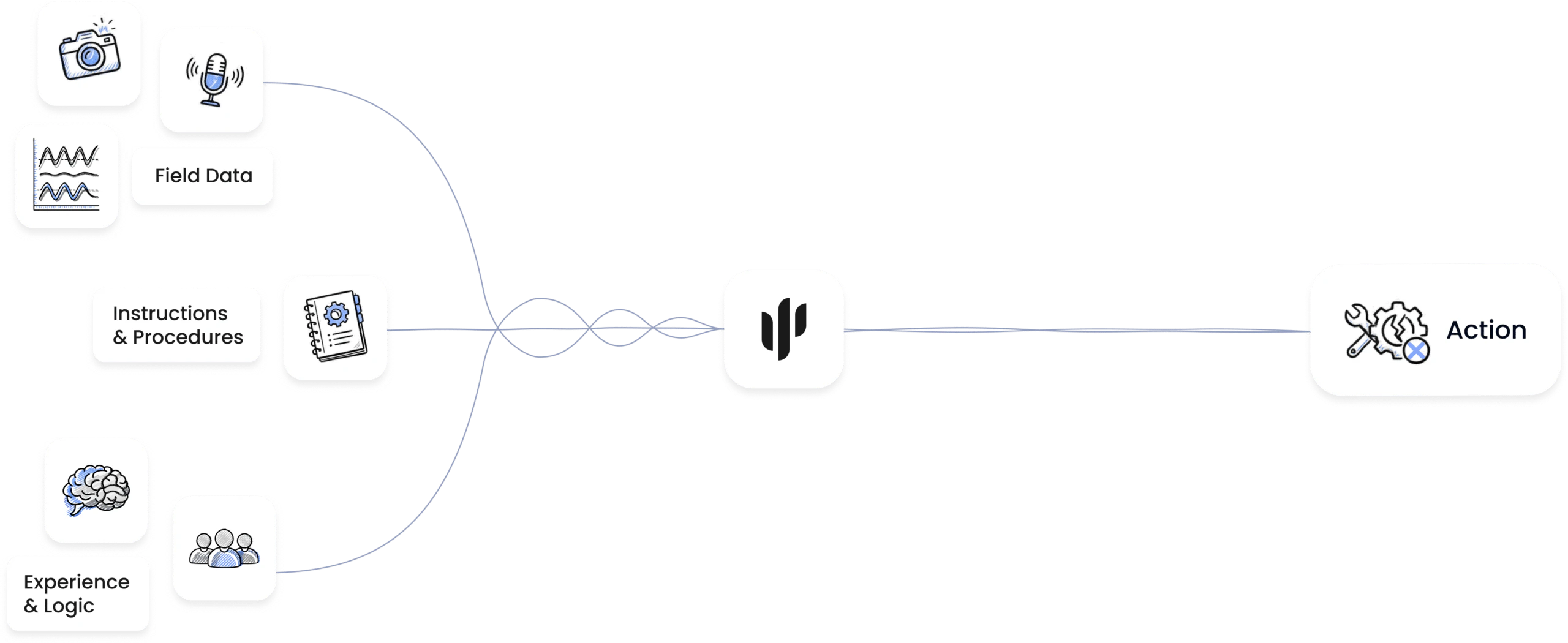
MolmoAct 2 adalah model fondasi robotika open-source yang membawa kontrol robot yang mampu berpikir ke lingkungan dunia nyata. Dibangun oleh Ai2, ia mengungguli alternatif proprietari pada tolok ukur industri sambil tetap sepenuhnya transparan untuk peneliti mempelajari, memperluas, dan menerapkannya.
Sorotan Produk
- Penalaran 3D Adaptif: MolmoAct 2-Think menggunakan token persepsi kedalaman dengan perutean cerdas untuk berpikir secara mendalam tentang struktur spasial hanya saat diperlukan, meningkatkan kinerja tanpa mengorbankan kecepatan.
- Inferensi 37x Lebih Cepat: Latensi panggilan tindakan dikurangi dari 6.700ms menjadi hanya 180ms (dasar) atau 790ms (dengan penalaran adaptif), memungkinkan respons robot hampir real-time.
- Manipulasi Dua Lengan Siap Pakai: Berbeda dengan pendahulunya, MolmoAct 2 menyertakan kemampuan koordinasi dua lengan langsung dalam model dasar, tanpa perlu penyetelan halus per tugas.
- Ekosistem Sepenuhnya Terbuka: Bobot model, kumpulan data pelatihan (termasuk kumpulan data MolmoAct 2-Bimanual YAM 720 jam), kode, dan MolmoAct 2-FAST Tokenizer open-source semua tersedia secara publik.
- Tulang Punggung Penalaran Terwujud: Dibangun di atas Molmo 2-ER, yang mencapai skor rata-rata 63,8 di 13 tolok ukur penalaran terwujud, mengungguli GPT-5, Gemini 2.5 Pro, dan sistem terkemuka lainnya.
Kasus Penggunaan
- Otomatisasi Laboratorium: Penyebaran di lingkungan laboratorium basah untuk tugas yang tepat dan berulang seperti alur kerja pengeditan gen CRISPR, penanganan sampel, dan pengoperasian peralatan, diuji dengan peneliti Stanford School of Medicine.
- Robotika Rumah Tangga dan Layanan: Menangani organisasi dapur, pembersihan meja, melipat handuk, dan manipulasi objek di lingkungan rumah yang tidak terstruktur tanpa pelatihan khusus lingkungan.
- Penelitian dan Pengembangan: Mempelajari dan memperluas pipeline VLA (Penglihatan-Bahasa-Tindakan) open-source yang lengkap, termasuk arsitektur adaptor baru dan mekanisme penalaran adaptif.
- Penyebaran Robot Biaya Rendah: Memanfaatkan kompatibilitas dengan perangkat keras open-source yang terjangkau seperti lengan SO-100/SO-101 untuk membangun solusi robotika yang dapat diakses.
Audiens Target
Peneliti robotika, insinyur AI, dan institusi akademik yang mencari model fondasi transparan dan berkinerja tinggi untuk AI terwujud. Juga ideal untuk insinyur otomasi di laboratorium dan industri layanan yang membutuhkan kemampuan manipulasi yang andal tanpa ketergantungan pada solusi proprietari.
Anda mungkin juga menyukai
Lihat semua alternatif →