MolmoAct 2.
3D空间先思考,机器人动作更精准高效
MolmoAct 2是开源动作推理模型,3D空间推理后执行机器人操作,支持双臂协同任务无需微调,速度提升37倍,专为机器人研究者与机器学习工程师设计。
周排行
▲ #19支持数
327适配平台
Web / Mobile上线时间
Recently
Favorite — quick open from Home.
更多关于 MolmoAct 2 的信息
MolmoAct 2
MolmoAct 2是由Ai2开发的开放式机器人基础模型,将具备推理能力的机器人控制带入真实世界环境。它在行业基准测试中超越了专有替代方案,同时保持完全透明,供研究人员研究、扩展和部署。
产品亮点
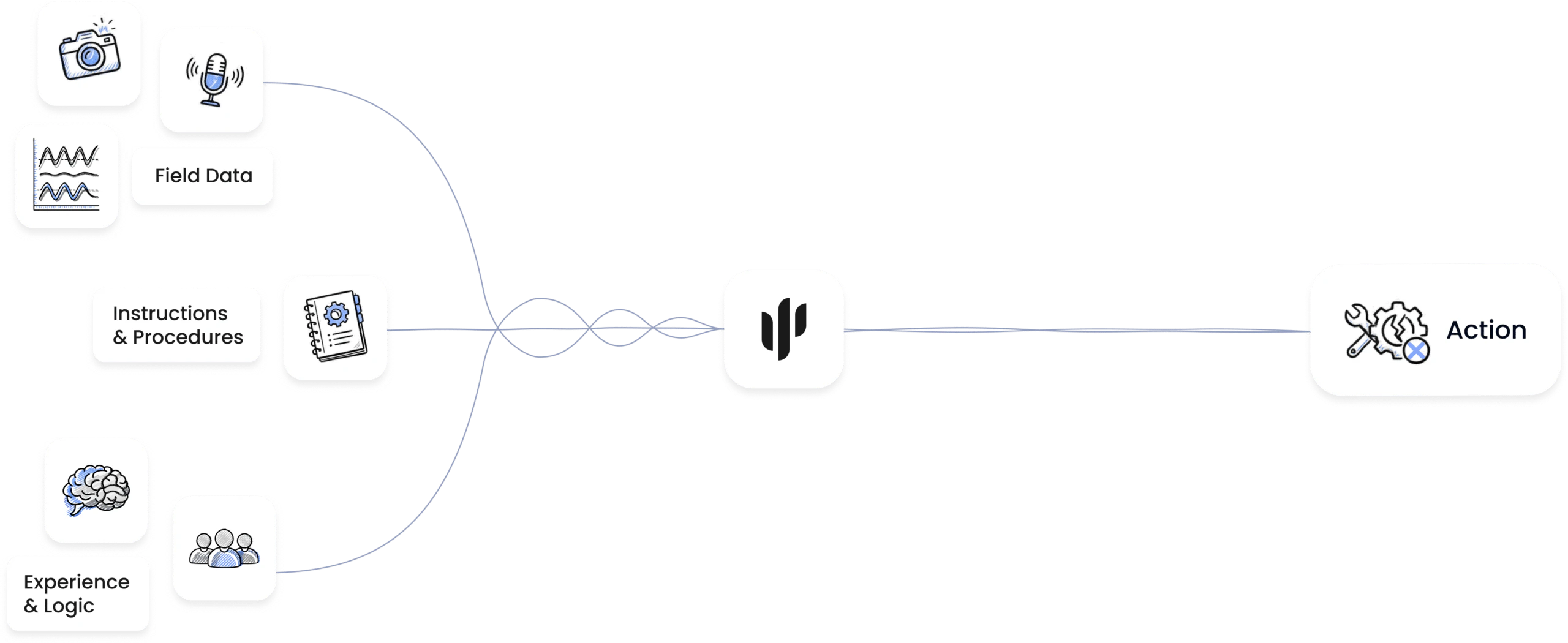
- 自适应3D推理:MolmoAct 2-Think使用深度感知令牌,并通过智能路由仅在需要时深入推理空间结构,在提升性能的同时不牺牲速度。
- 推理速度提升37倍:动作调用延迟从6,700毫秒降至仅180毫秒(基础版)或790毫秒(自适应推理版),实现接近实时的机器人响应。
- 开箱即用的双臂操作:与前代产品不同,MolmoAct 2在基础模型中直接内置双臂协调功能,无需针对特定任务进行微调。
- 完全开放的生态系统:模型权重、训练数据集(包括720小时的MolmoAct 2-Bimanual YAM数据集)、代码以及开放的MolmoAct 2-FAST Tokenizer全部公开可用。
- 具身推理骨干网络:基于Molmo 2-ER构建,在13个具身推理基准测试中平均得分63.8,超越GPT-5、Gemini 2.5 Pro等领先系统。
应用场景
- 实验室自动化:在湿实验室环境中部署,执行CRISPR基因编辑工作流程、样本处理和设备操作等精确重复任务——已与斯坦福医学院研究人员完成测试。
- 家庭与服务机器人:无需针对特定环境训练,即可在非结构化的家庭环境中处理厨房整理、餐桌清理、毛巾折叠和物品操作等任务。
- 研究与开发:研究并扩展完整的开放VLA(视觉-语言-动作)流程,包括新颖的适配器架构和自适应推理机制。
- 低成本机器人部署:利用与SO-100/SO-101等经济实惠的开源硬件的兼容性,构建可及的机器人解决方案。
目标用户
寻求透明、高性能具身AI基础模型的机器人研究人员、AI工程师和学术机构。同时适合需要可靠操作能力但不愿受专有方案束缚的实验室和服务行业自动化工程师。
你可能也喜欢
查看所有替代品 →